


The miniature piezomotor developed by Piezo Motion provides significant advantages in motion control applications that demand small size, high performance, precision motors.
A novel, low-power, high-performance rotary motor built around the piezoelectric principle overcomes the limitations of conventional high-precision miniature DC stepper motors. It opens new opportunities for motion control design within the medical devices and technology industries.
The new piezomotor provides exceptional resolution, fast response time, ultra-smooth motion—without the vibrational interference caused by traditional DC stepper motors. The motor design enables accurate angular positioning and the ability to maintain any set position without the need for applied power, characteristics that are essential for many medical devices and high-tech applications.
Until now, precision miniaturized positioning devices have relied solely upon rotary electromagnetic (EM) motors (e.g., stepper motors).

CONVENTIONAL STEPPER MOTION
A conventional DC stepper motor is essentially a brushless DC motor (BLDC) in which a full 360-degree rotation is divided into several equal steps. Stepper motors have multiple electromagnets arranged as a stator around a central magnetic rotor which is connected to the motor shaft.
The rotor looks like a cog wheel in design because it has raised cogs/teeth around its circumference. When the electromagnets are energized (e.g., an external driver circuit), they attract the nearest cog. The rotation of the rotor is controlled by the sequential energization of each electromagnet.
This occurs when the cog is attracted to the first electromagnet. The next electromagnet is turned on. The first is turned off, causing the rotor to rotate to align the cog with the second electromagnetic. The process is repeated to the next electromagnetic, causing rotation. Each of those rotations is essentially a step combined to form a full rotation.
DRAWBACKS OF CONVENTIONAL DC STEPPER MOTORS
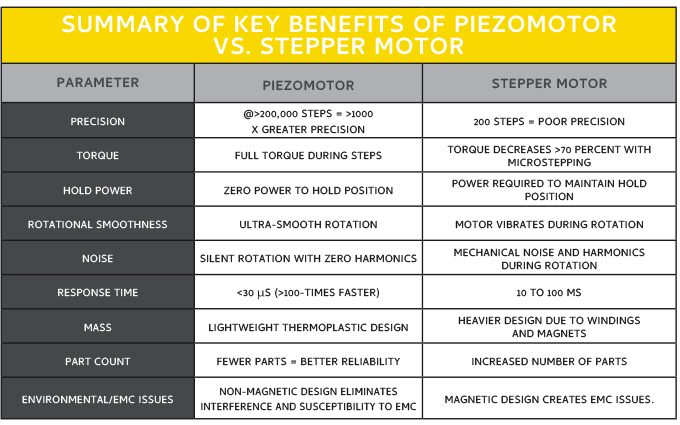
DC stepper motors move in discrete steps in response to electrical step and direction pulses. They are often distinguished by size, torque rating, speed, and/or the angle of the step. Typical stepper motors have a step angle of between 1.8 degrees and 0.72 degrees, providing between 200 to 500 steps per full rotation. These large step sizes create motor vibration leading to poor smoothness of rotation, mechanical noise, and resonance problems. The problem is even worse at slow speeds, which amplify the unevenness of rotation of the stepper motor.
One way to alleviate this lack of smoothness and mechanical noise is to reduce the size of the stepper motor’s steps. This is achieved using a technique called microstepping, which enables the motor to rotate less than one complete step—often between 16 and 256 microsteps per one full step, thereby providing up to 51,200 microsteps per full rotation. Microstepping is achieved using a pulse-width modulated (PWM) voltage to control current to the motor and requires more complicated and costly control circuitry.
One fundamental problem with microstepping is that as you increase the number of microsteps per full step, the incremental torque per microstep decreases substantially. For example, at 16 microstep the holding torque is lowered by 10 percent of the original torque at a single full step, as the number of microsteps increases the torque rapidly decreases by more than 70 percent.
The drawbacks of stepper motors get worse with smaller frame sizes. Miniature high precision stepper motors are complicated to manufacture and can be unreliable and expensive. Generally, most stepper motor suppliers offer frame sizes in the range of 0.78 to 3.5 inches (NEMA 8 to NEMA 34). Precision Stepper motors smaller than 0.78-inch frame size are difficult to find and costly.
THE NEW PIEZOMOTOR SOLUTION
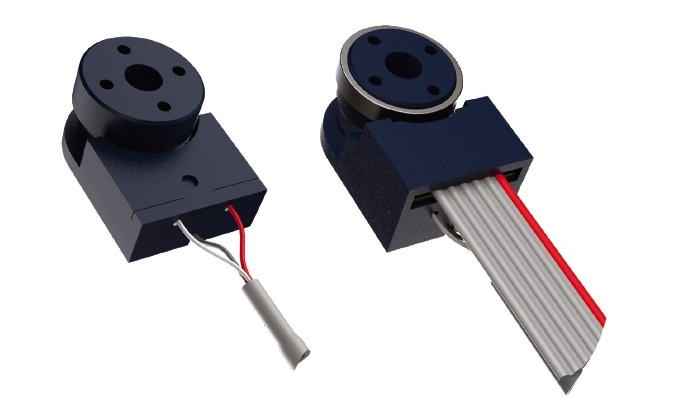
The need for an alternative rotary motor that can overcome these limitations has been met with the development by Piezo Motion of a novel high-performance miniature rotary piezomotor, the model RAS.
reinforced engineering thermoplastics, and with a rotor diameter of just 0.44 inches, this piezomotor provides superior precision and ultrafast response/start-stop characteristics; all within an affordable design. The motor is highly energy-efficient and consumes zero power in hold position while still providing significant torque.
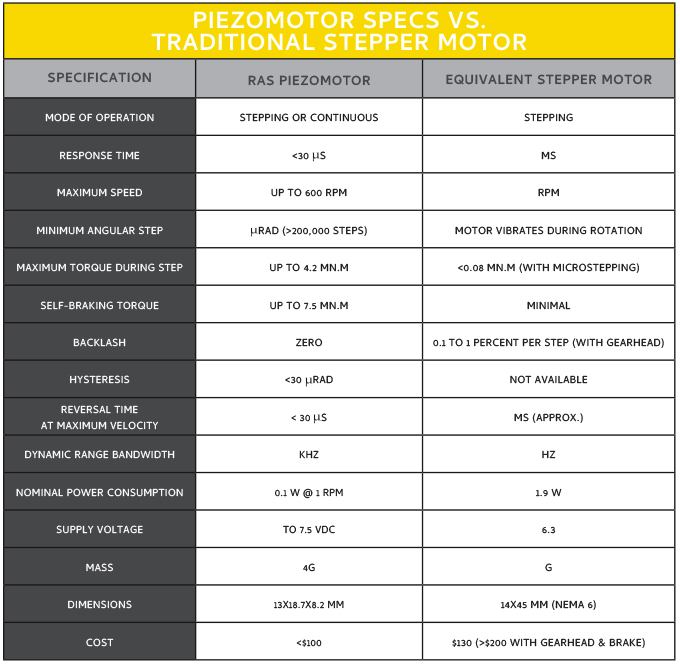
What is exciting about the new motor is its minimum step size of just 30 μrad, which equates to more than 200,000 steps per full rotation of control. Furthermore, unlike a microstepping stepper motor which loses more than 70 percent torque during a microstep, the piezomotor maintains full torque during every step and provides ultra-smooth and silent rotation.
With a reaction time of fewer than thirty microseconds, the piezomotor is at least 100-times faster at responding than a stepper motor.
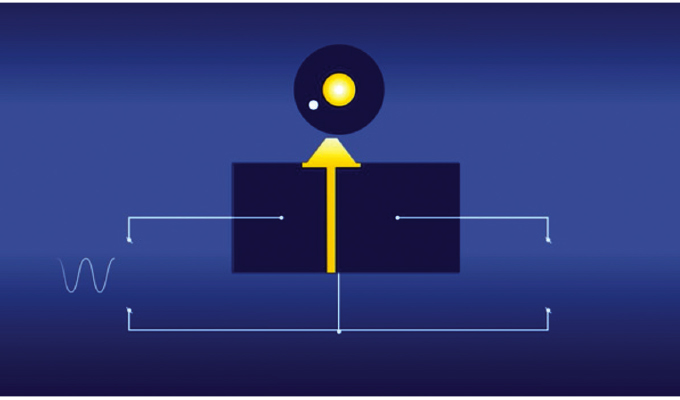
PRINCIPLES OF OPERATION
Piezo Motion’s motors work on the principle of ultrasonic standing waves, which cause electrically induced excitation within a monolithic rectangular-shaped piezoelectric resonator/ceramic. The patented principle of excitation uses two orthogonal vibration modes. The two modes of vibration cause the piezo ceramic to oscillate and create rotation of the rotor which is pushed against the piezoceramic. The technique greatly simplifies drive circuit design and requires very low voltages, reducing the drive electronics cost.
The new piezomotor is the ideal choice for OEM applications where superior performance and competitive unit cost are important factors. Available in a variety of configurations, including hollow-shaft, solid shaft and with/without integrated encoder, they provide superior performance compared to a conventional stepper motor.
The piezomotor provides micro-radian resolution, ultra-smooth rotation, and zero backlash. The use of engineering thermoplastic in the design enables the motor to be manufactured with non-magnetic materials, making it suitable for MRI and other applications where high electromagnetic fields may be present.
CONTROL OF MOTION
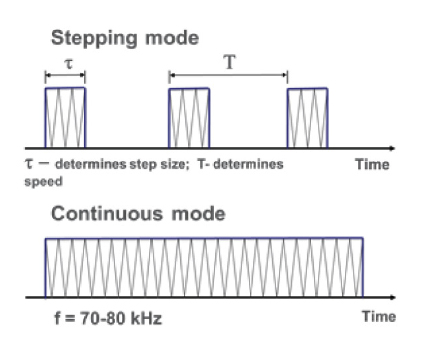
The Piezo Motion motor is straightforward to control using an external signal source on the motor driver board. A digitally controlled AC voltage source applies a train of electrical pulses directly to the piezoceramic. Motor speed is controlled by changing the sequence or duration of the pulses (i.e., PWM). Modulation of the excitation voltage source enables switching between a continuous rotation to a precise stepping mode.
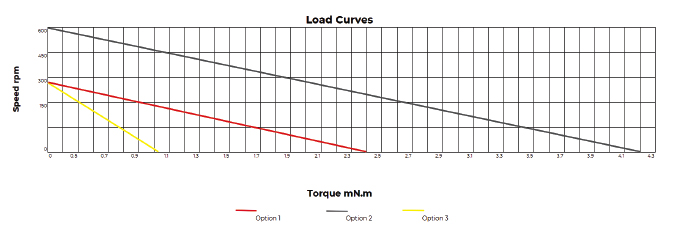
The piezomotor electronic driver PCB has been designed to provide an economical user-control interface. The driver PCB is supplied with pre-programmed firmware for optimization of motion control and enables factory customization of motor output performance specifications, including rotational speed and torque.
ABOUT THE AUTHOR
Mark Broderick, PhD, is president of Piezo Motion Corp. Piezo Motion is a leader in piezo motor technology with multi-million-dollar investments in research and development of affordable piezoelectric motors to meet, and exceed, the needs of today’s global markets. The company is committed to developing innovative piezoelectric technology and motion products that enhance their functionality in a multitude of applications. Piezo Motion partners with startups, OEMs, research institutions, and industrial companies. For more information, visit www.piezomotion.com.
MODERN PUMPING TODAY, April 2022
Did you enjoy this article?
Subscribe to the FREE Digital Edition of Modern Pumping Today Magazine!
